长江日报大武汉客户端10月24日讯(记者汪洋 通讯员李雄风)近日,(中国)股份有限公司校计算机学院大四学生张霄雨及其团队在老师的指导下,研发出“多智能车协同的自主导航技术”。
该作品获湖北省第十四届“挑战杯”大学生课外学术作品竞赛特等奖,并入围第十八届“挑战杯”全国大学生课外学术科技作品竞赛终审决赛。
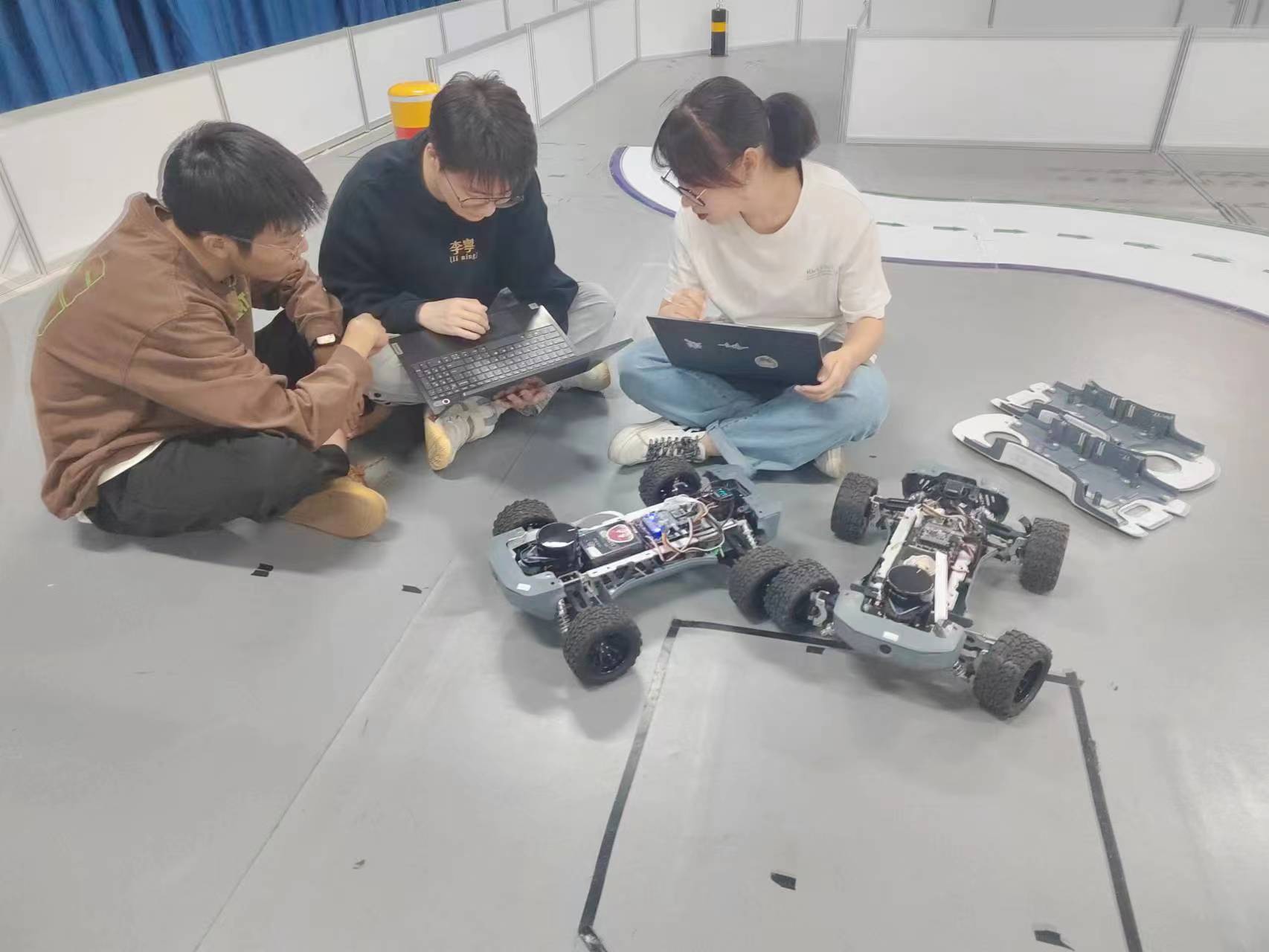
团队成员调试小车硬件参数。
张霄雨告诉记者,传统的方法是由人给车辆分配任务,每辆车独自作业去采集数据,再根据数据进行地图绘制,效率比较低。团队以航天轻舟机器人为研究对象,研究出了新的算法,在这一算法下,多辆智能车协同作业,可自主探索路径并自动分配探索任务,无需人工指引。
算法采取众包地图的模式,派出任务的车辆组成智能群体,队员车通过激光雷达、超声波等采集环境信息,绘制出高精度的局部地图后发送给队长车。队长车则进行数据处理、任务分发、全局地图构建等。
“队长车就像‘大脑’,接收数据、分析数据,再进行指挥,实现自主和智能协作。”张霄雨介绍,该算法研究过程很不容易,在300多天的研发中,他们几乎一下课就会泡在实验室,不断地写代码,改代码,调试车辆等。
“我们第一次将车拿出实验室进行调试时,刚启动,队长车就宕机了。”张霄雨说,当时团队成员们都感到迷惑,不知道问题出在哪儿,经过指导老师靳华中的帮助,他们排查发现,原来,由于室外物件多,环境复杂,通过激光雷达等采集到的数据过大,数据悉数发送至队长车后,队长车无法处理这些数据,于是宕机了。
知道了“症状”,他们豁然开朗,继续进行研究,“对症下药”解决了问题。
张霄雨介绍,在某些应用场景下,存在全球导航卫星系统等信号缺失或较弱的问题,而该方法可以克服对卫星或信标的依赖。
据卫星导航技术研究中心相关专家介绍,该算法相较传统方法,配准速度提升10%以上,地图精度可达厘米级。
目前,团队已经与武汉卓尔信息科技有限公司等企业达成了应用合作,将研发成果运用于酿酒车间和物流仓库等。围绕该项研究,团队已发表SCI论文2篇,申请发明专利2项等。
【编辑:邓腊秀】
【原文链接】http://m.app.dawuhanapp.com/p/30095588.html